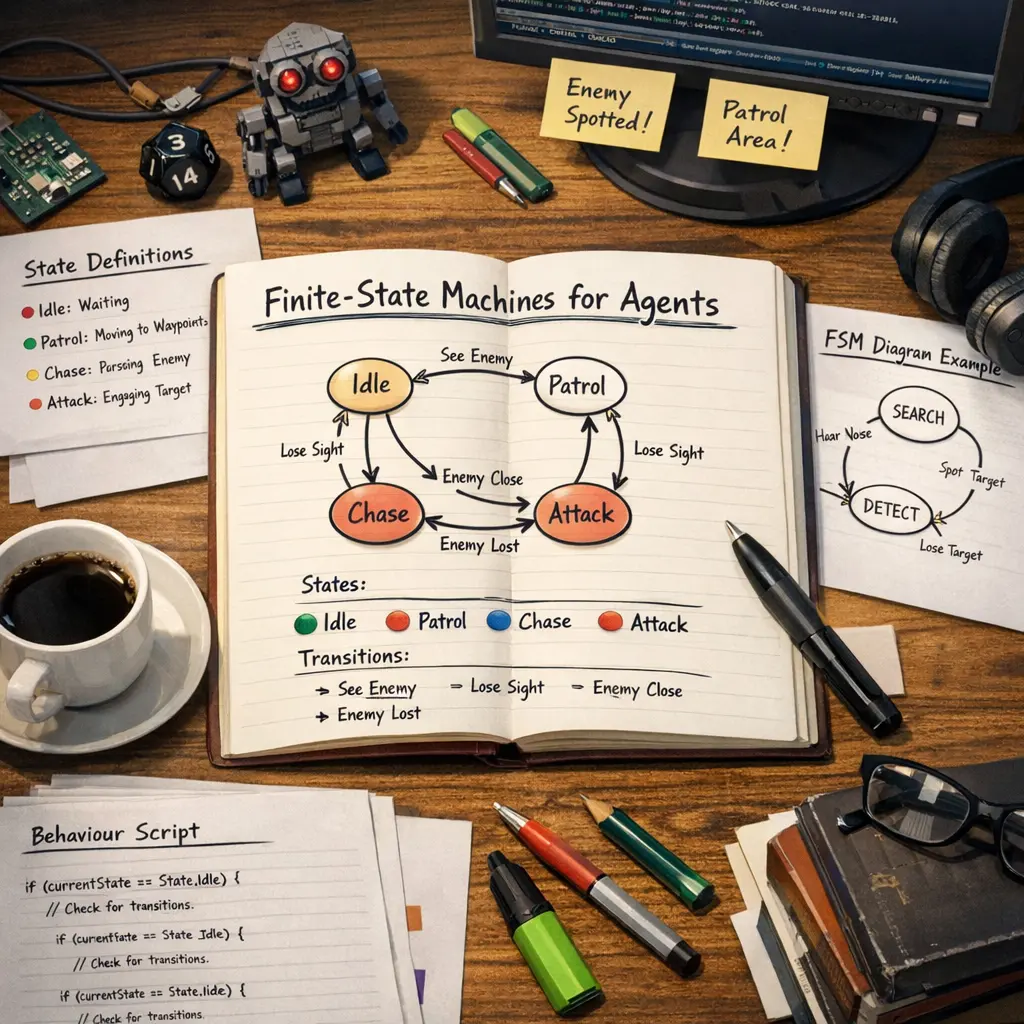
Finite-State Machines (FSMs) for agents refer to a computational model where an agent’s behavior is defined by a finite number of states, transitions between those states, and actions. Each state represents a specific mode of operation, and transitions occur based on inputs or events. This architecture enables agents to exhibit structured, predictable behavior, making FSMs suitable for tasks like game AI, robotics, and control systems, where clear, rule-based responses are required.
Finite-State Machines for Agents
Finite-State Machines (FSMs) for agents refer to a computational model where an agent’s behavior is defined by a finite number of states, transitions between those states, and actions. Each state represents a specific mode of operation, and transitions occur based on inputs or events. This architecture enables agents to exhibit structured, predictable behavior, making FSMs suitable for tasks like game AI, robotics, and control systems, where clear, rule-based responses are required.
💡 Key Takeaways
- Understand how finite-state machines model an agent's behavior using states, transitions, inputs, and actions.
- Distinguish between deterministic and non-deterministic FSMs and know when each is appropriate for agents.
- Learn a step-by-step approach to designing an agent FSM: define states, transitions with conditions, and outputs.
- Identify common use cases and limitations of FSMs in agent systems.
❓ Frequently Asked Questions
What is a finite-state machine for an agent?
An FSM models an agent's behavior as a set of states with transitions triggered by inputs or events; the agent chooses actions based on its current state.
What is the difference between Moore and Mealy machines in this context?
In a Moore machine, outputs depend only on the current state. In a Mealy machine, outputs depend on both the current state and the input that caused the transition.
When is using FSMs appropriate for designing agent behavior?
FSMs are best for simple, discrete, rule-based behaviors that are easy to reason about and implement. They can become hard to manage for complex or continuous perception without extensions.
What are common limitations of FSM-based agents and how can you mitigate them?
FSMs can suffer from state explosion as the number of states grows. Mitigations include hierarchical or modular FSMs, and combining FSMs with other AI techniques for more complex perception and planning.
How do you implement a basic FSM-based agent?
Define the states, inputs/events, and transitions; maintain a state variable; in a loop read inputs, determine the next state via transitions, and execute the action associated with the current state.